
ໃນອາທິດກ່ອນ, ພວກເຮົາໄດ້ແນະນຳຂະບວນການມ້ວນຂອງຕົວເກັບປະຈຸໄຟຟ້າແບບຟິມ, ແລະໃນອາທິດນີ້ຂ້າພະເຈົ້າຢາກເວົ້າກ່ຽວກັບເຕັກໂນໂລຢີທີ່ສຳຄັນຂອງຕົວເກັບປະຈຸໄຟຟ້າແບບຟິມ.
1. ເຕັກໂນໂລຊີການຄວບຄຸມຄວາມເຄັ່ງຕຶງຄົງທີ່
ເນື່ອງຈາກຄວາມຕ້ອງການດ້ານປະສິດທິພາບໃນການເຮັດວຽກ, ການຂົດລວດມັກຈະຢູ່ໃນລະດັບຄວາມສູງທີ່ສູງກວ່າໂດຍທົ່ວໄປໃນສອງສາມໄມຄຣອນ. ແລະວິທີການຮັບປະກັນຄວາມຕຶງຄຽດທີ່ຄົງທີ່ຂອງວັດສະດຸຟິມໃນຂະບວນການຂົດລວດຄວາມໄວສູງແມ່ນມີຄວາມສຳຄັນເປັນພິເສດ. ໃນຂະບວນການອອກແບບພວກເຮົາບໍ່ພຽງແຕ່ຕ້ອງພິຈາລະນາຄວາມຖືກຕ້ອງຂອງໂຄງສ້າງກົນຈັກເທົ່ານັ້ນ, ແຕ່ຍັງມີລະບົບຄວບຄຸມຄວາມຕຶງຄຽດທີ່ສົມບູນແບບອີກດ້ວຍ.
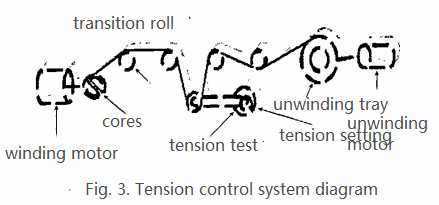
ລະບົບຄວບຄຸມໂດຍທົ່ວໄປປະກອບດ້ວຍຫຼາຍພາກສ່ວນຄື: ກົນໄກການປັບຄວາມຕຶງ, ເຊັນເຊີກວດຈັບຄວາມຕຶງ, ມໍເຕີປັບຄວາມຕຶງ, ກົນໄກການປ່ຽນແປງ, ແລະອື່ນໆ. ແຜນວາດແຜນວາດຂອງລະບົບຄວບຄຸມຄວາມຕຶງແມ່ນສະແດງຢູ່ໃນຮູບທີ 3.
ຕົວເກັບປະຈຸແບບຟິມຕ້ອງການຄວາມແຂງກະດ້າງໃນລະດັບໜຶ່ງຫຼັງຈາກການຂົດລວດ, ແລະວິທີການຂົດລວດໃນຕອນຕົ້ນແມ່ນການໃຊ້ສະປິງເປັນຕົວເຮັດໃຫ້ຄວາມຕຶງຄຽດເພື່ອຄວບຄຸມຄວາມຕຶງຂອງຂົດລວດ. ວິທີການນີ້ຈະເຮັດໃຫ້ເກີດຄວາມຕຶງທີ່ບໍ່ສະໝໍ່າສະເໝີເມື່ອມໍເຕີຂົດລວດເລັ່ງ, ຊ້າລົງ ແລະ ຢຸດໃນລະຫວ່າງຂະບວນການຂົດລວດ, ເຊິ່ງຈະເຮັດໃຫ້ຕົວເກັບປະຈຸມີຄວາມຜິດປົກກະຕິ ຫຼື ຜິດຮູບໄດ້ງ່າຍ, ແລະ ການສູນເສຍຂອງຕົວເກັບປະຈຸກໍ່ມີຂະໜາດໃຫຍ່ເຊັ່ນກັນ. ໃນຂະບວນການຂົດລວດ, ຄວນຮັກສາຄວາມຕຶງໃນລະດັບໜຶ່ງ, ແລະ ສູດແມ່ນດັ່ງຕໍ່ໄປນີ້.
F=K×B×H
ໃນສູດນີ້:F-ເທຊັນ
K-ສຳປະສິດເທຊັນ
B-ຄວາມກວ້າງຂອງຟິມ (ມມ)
ຮ-ຄວາມໜາຂອງຟິມ (ໄມຄຣມ)
ຕົວຢ່າງ, ຄວາມຕຶງຂອງຄວາມກວ້າງຂອງຟິມ = 9 ມມ ແລະ ຄວາມໜາຂອງຟິມ = 4.8μm. ຄວາມຕຶງຂອງມັນແມ່ນ: 1.2 × 9 × 4.8 = 0.5 (N)
ຈາກສົມຜົນ (1), ສາມາດໄດ້ຮັບຂອບເຂດຂອງຄວາມຕຶງ. ສະປິງ eddy ທີ່ມີຄວາມເປັນເສັ້ນຊື່ດີຖືກເລືອກເປັນການຕັ້ງຄ່າຄວາມຕຶງ, ໃນຂະນະທີ່ໂພເທນຊິໂອມິເຕີ induction ແມ່ເຫຼັກທີ່ບໍ່ສຳຜັດຖືກໃຊ້ເປັນການກວດຈັບຄວາມຕຶງເພື່ອຄວບຄຸມແຮງບິດຜົນຜະລິດ ແລະ ທິດທາງຂອງມໍເຕີ servo DC ທີ່ຖືກຄາຍອອກໃນລະຫວ່າງມໍເຕີທີ່ມ້ວນ, ດັ່ງນັ້ນຄວາມຕຶງຈຶ່ງຄົງທີ່ຕະຫຼອດຂະບວນການມ້ວນ.
2. ເຕັກໂນໂລຊີການຄວບຄຸມການມ້ວນ
ຄວາມຈຸຂອງແກນຕົວເກັບປະຈຸແມ່ນກ່ຽວຂ້ອງຢ່າງໃກ້ຊິດກັບຈຳນວນຮອບຂອງການຂົດລວດ, ສະນັ້ນການຄວບຄຸມຄວາມແມ່ນຍຳຂອງແກນຕົວເກັບປະຈຸຈຶ່ງກາຍເປັນເທັກໂນໂລຢີທີ່ສຳຄັນ. ການຂົດລວດຂອງແກນຕົວເກັບປະຈຸມັກຈະເຮັດດ້ວຍຄວາມໄວສູງ. ເນື່ອງຈາກຈຳນວນຮອບຂອງການຂົດລວດມີຜົນກະທົບໂດຍກົງຕໍ່ຄ່າຄວາມຈຸ, ການຄວບຄຸມຈຳນວນຮອບຂອງການຂົດລວດ ແລະ ການນັບຕ້ອງການຄວາມແມ່ນຍຳສູງ, ເຊິ່ງປົກກະຕິແລ້ວແມ່ນບັນລຸໄດ້ໂດຍການໃຊ້ໂມດູນນັບຄວາມໄວສູງ ຫຼື ເຊັນເຊີທີ່ມີຄວາມແມ່ນຍຳໃນການກວດສອບສູງ. ນອກຈາກນັ້ນ, ເນື່ອງຈາກຄວາມຕ້ອງການທີ່ຄວາມຕຶງຄຽດຂອງວັດສະດຸປ່ຽນແປງໜ້ອຍທີ່ສຸດເທົ່າທີ່ຈະເປັນໄປໄດ້ໃນລະຫວ່າງຂະບວນການຂົດລວດ (ຖ້າບໍ່ດັ່ງນັ້ນວັດສະດຸຈະສັ່ນສະເທືອນຢ່າງຫຼີກລ່ຽງບໍ່ໄດ້, ເຊິ່ງສົ່ງຜົນກະທົບຕໍ່ຄວາມແມ່ນຍຳຂອງຄວາມສາມາດ), ການຂົດລວດຕ້ອງໃຊ້ເທັກໂນໂລຢີການຄວບຄຸມທີ່ມີປະສິດທິພາບ.
ການຄວບຄຸມຄວາມໄວແບບແບ່ງສ່ວນ ແລະ ການເລັ່ງ/ຫຼຸດຄວາມໄວທີ່ສົມເຫດສົມຜົນ ແລະ ການປະມວນຜົນຄວາມໄວທີ່ປ່ຽນແປງໄດ້ ແມ່ນໜຶ່ງໃນວິທີການທີ່ມີປະສິດທິພາບຫຼາຍກວ່າ: ຄວາມໄວໃນການມ້ວນທີ່ແຕກຕ່າງກັນແມ່ນໃຊ້ສຳລັບໄລຍະເວລາການມ້ວນທີ່ແຕກຕ່າງກັນ; ໃນລະຫວ່າງໄລຍະເວລາຄວາມໄວທີ່ປ່ຽນແປງໄດ້, ການເລັ່ງ ແລະ ການຫຼຸດຄວາມໄວແມ່ນໃຊ້ກັບເສັ້ນໂຄ້ງຄວາມໄວທີ່ປ່ຽນແປງໄດ້ທີ່ສົມເຫດສົມຜົນເພື່ອກຳຈັດຄວາມສັ່ນສະເທືອນ, ແລະອື່ນໆ.
3. ເຕັກໂນໂລຊີການກຳຈັດໂລຫະ
ວັດສະດຸຫຼາຍຊັ້ນຖືກພັນຊ້ອນກັນ ແລະ ຕ້ອງການການປິ່ນປົວດ້ວຍຄວາມຮ້ອນຢູ່ດ້ານນອກ ແລະ ດ້ານໜ້າ. ໂດຍບໍ່ຕ້ອງເພີ່ມວັດສະດຸຟິມພາດສະຕິກ, ຟິມໂລຫະທີ່ມີຢູ່ແລ້ວຈະຖືກນຳໃຊ້ ແລະ ຟິມໂລຫະຂອງມັນຈະຖືກນຳໃຊ້ ແລະ ການຊຸບໂລຫະຂອງມັນຖືກກຳຈັດອອກໂດຍເຕັກນິກການຫຼຸດໂລຫະເພື່ອໃຫ້ໄດ້ຟິມພາດສະຕິກກ່ອນການປິດຜະນຶກດ້ານນອກ.
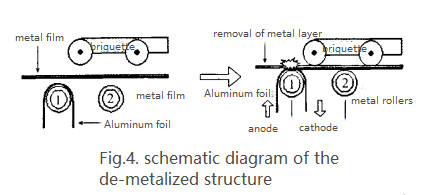
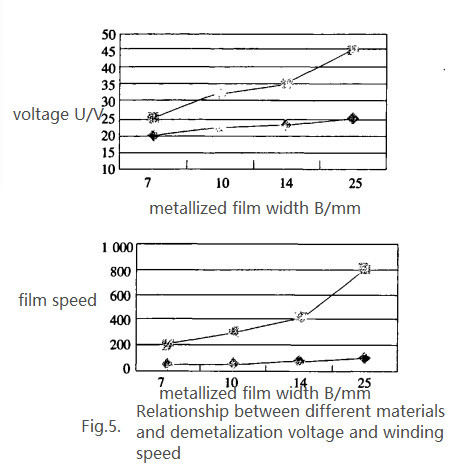
ເຕັກໂນໂລຊີນີ້ສາມາດປະຫຍັດຄ່າໃຊ້ຈ່າຍວັດສະດຸ ແລະ ໃນເວລາດຽວກັນຫຼຸດຜ່ອນເສັ້ນຜ່າສູນກາງພາຍນອກຂອງແກນຕົວເກັບປະຈຸ (ໃນກໍລະນີທີ່ມີຄວາມຈຸເທົ່າທຽມກັນຂອງແກນ). ນອກຈາກນັ້ນ, ໂດຍການນໍາໃຊ້ເຕັກໂນໂລຊີການກຳຈັດໂລຫະ, ການເຄືອບໂລຫະຂອງຊັ້ນໃດໜຶ່ງ (ຫຼື ສອງຊັ້ນ) ຂອງຟິມໂລຫະສາມາດຖືກກຳຈັດອອກລ່ວງໜ້າຢູ່ທີ່ຈຸດເຊື່ອມຕໍ່ແກນ, ດັ່ງນັ້ນຈຶ່ງຫຼີກລ່ຽງການເກີດວົງຈອນລັດທີ່ແຕກຫັກ, ເຊິ່ງສາມາດປັບປຸງຜົນຜະລິດຂອງແກນທີ່ມ້ວນໄດ້ຢ່າງຫຼວງຫຼາຍ. ຈາກຮູບທີ 5, ສາມາດສະຫຼຸບໄດ້ວ່າເພື່ອໃຫ້ບັນລຸຜົນການກຳຈັດດຽວກັນ. ແຮງດັນການກຳຈັດຖືກອອກແບບມາໃຫ້ສາມາດປັບໄດ້ຈາກ 0V ຫາ 35V. ຄວາມໄວຕ້ອງຫຼຸດລົງລະຫວ່າງ 200r/ນາທີ ແລະ 800 r/ນາທີ ສຳລັບການກຳຈັດໂລຫະຫຼັງຈາກການຂົດລວດຄວາມໄວສູງ. ແຮງດັນ ແລະ ຄວາມໄວທີ່ແຕກຕ່າງກັນສາມາດຕັ້ງຄ່າໄດ້ສຳລັບຜະລິດຕະພັນທີ່ແຕກຕ່າງກັນ.
4. ເຕັກໂນໂລຊີການຜະນຶກຄວາມຮ້ອນ
ການປະທັບຕາດ້ວຍຄວາມຮ້ອນແມ່ນໜຶ່ງໃນເຕັກໂນໂລຢີທີ່ສຳຄັນທີ່ສົ່ງຜົນກະທົບຕໍ່ຄຸນນະພາບຂອງແກນຕົວເກັບປະຈຸໄຟຟ້າແບບມີບາດແຜ. ການປະທັບຕາດ້ວຍຄວາມຮ້ອນແມ່ນການໃຊ້ເຫຼັກເຊື່ອມທີ່ມີອຸນຫະພູມສູງເພື່ອບີບ ແລະ ຕິດຟິມພາດສະຕິກຢູ່ທີ່ຈຸດເຊື່ອມຕໍ່ຂອງແກນຕົວເກັບປະຈຸໄຟຟ້າແບບຂົດລວດ ດັ່ງທີ່ສະແດງຢູ່ໃນຮູບທີ 6. ເພື່ອບໍ່ໃຫ້ແກນຖືກມ້ວນອອກຢ່າງວ່າງໆ, ມັນຈຳເປັນຕ້ອງໄດ້ຕິດກັນຢ່າງໜ້າເຊື່ອຖື ແລະ ໜ້າສຸດທ້າຍແມ່ນຮາບພຽງ ແລະ ງາມ. ມີຫຼາຍປັດໄຈຫຼັກທີ່ສົ່ງຜົນກະທົບຕໍ່ຜົນກະທົບຂອງການປະທັບຕາດ້ວຍຄວາມຮ້ອນຄື ອຸນຫະພູມ, ເວລາປະທັບຕາດ້ວຍຄວາມຮ້ອນ, ການມ້ວນ ແລະ ຄວາມໄວຂອງແກນ, ແລະອື່ນໆ.
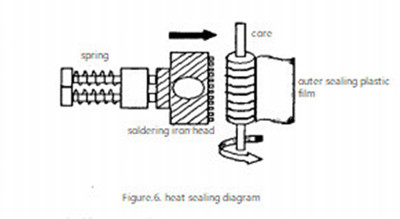
ໂດຍທົ່ວໄປ, ອຸນຫະພູມຂອງການປະທັບຕາດ້ວຍຄວາມຮ້ອນຈະປ່ຽນແປງໄປຕາມຄວາມໜາຂອງຟິມ ແລະ ວັດສະດຸ. ຖ້າຄວາມໜາຂອງຟິມຂອງວັດສະດຸດຽວກັນແມ່ນ 3μm, ອຸນຫະພູມຂອງການປະທັບຕາດ້ວຍຄວາມຮ້ອນຈະຢູ່ໃນລະດັບ 280℃ ແລະ 350℃, ໃນຂະນະທີ່ຄວາມໜາຂອງຟິມແມ່ນ 5.4μm, ອຸນຫະພູມຂອງການປະທັບຕາດ້ວຍຄວາມຮ້ອນຄວນປັບໃຫ້ຢູ່ໃນລະດັບ 300cc ແລະ 380cc. ຄວາມເລິກຂອງການປະທັບຕາດ້ວຍຄວາມຮ້ອນແມ່ນກ່ຽວຂ້ອງໂດຍກົງກັບເວລາການປະທັບຕາດ້ວຍຄວາມຮ້ອນ, ລະດັບການບີບ, ອຸນຫະພູມຂອງເຫຼັກເຊື່ອມ, ແລະອື່ນໆ. ການຄວບຄຸມຄວາມເລິກຂອງການປະທັບຕາດ້ວຍຄວາມຮ້ອນຍັງມີຄວາມສຳຄັນເປັນພິເສດສຳລັບວ່າແກນຕົວເກັບປະຈຸທີ່ມີຄຸນນະພາບສາມາດຜະລິດໄດ້ຫຼືບໍ່.
5. ສະຫຼຸບ
ຜ່ານການຄົ້ນຄວ້າ ແລະ ພັດທະນາໃນຊຸມປີມໍ່ໆມານີ້, ຜູ້ຜະລິດອຸປະກອນພາຍໃນປະເທດຫຼາຍແຫ່ງໄດ້ພັດທະນາອຸປະກອນມ້ວນຕົວເກັບປະຈຸໄຟຟ້າແບບຟິມ. ຫຼາຍໆອັນແມ່ນດີກ່ວາຜະລິດຕະພັນດຽວກັນທັງພາຍໃນ ແລະ ຕ່າງປະເທດໃນດ້ານຄວາມໜາຂອງວັດສະດຸ, ຄວາມໄວໃນການມ້ວນ, ໜ້າທີ່ການຫຼຸດໂລຫະ ແລະ ຜະລິດຕະພັນມ້ວນ, ແລະ ມີລະດັບເຕັກໂນໂລຊີທີ່ກ້າວໜ້າລະດັບສາກົນ. ນີ້ແມ່ນພຽງແຕ່ຄຳອະທິບາຍສັ້ນໆກ່ຽວກັບເຕັກໂນໂລຊີທີ່ສຳຄັນຂອງເຕັກນິກການມ້ວນຕົວເກັບປະຈຸໄຟຟ້າແບບຟິມ, ແລະ ພວກເຮົາຫວັງວ່າດ້ວຍຄວາມກ້າວໜ້າຢ່າງຕໍ່ເນື່ອງຂອງເຕັກໂນໂລຊີທີ່ກ່ຽວຂ້ອງກັບຂະບວນການຜະລິດຕົວເກັບປະຈຸໄຟຟ້າແບບຟິມພາຍໃນປະເທດ, ພວກເຮົາສາມາດຊຸກຍູ້ການພັດທະນາຢ່າງແຂງແຮງຂອງອຸດສາຫະກຳອຸປະກອນການຜະລິດຕົວເກັບປະຈຸໄຟຟ້າແບບຟິມໃນປະເທດຈີນ.
ເວລາໂພສ: ວັນທີ 15 ມີນາ 2022